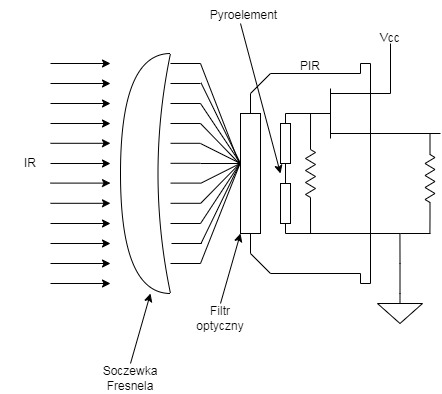
Czujnik PIR (ang. Passive Infra Red) wykorzystywany jest w alarmach, detekcjach ruchu, w automatyce budynkowej, jako czujnik do załączenia oświetlenia, w IoT czy jako detektor poszukiwania ludzi podczas klęsk żywiołowych przez służby ratunkowe. Czujnik detektuje fale elektromagnetyczne w zakresie podczerwieni (ciepło) emitowane lub odbite od obiektów. Czujnik PIR nie emituje fal, lecz mierzy fale w zakresie podczerwieni. Czujnik PIR jest w stanie odróżnić ciepło emitowane przez urządzenia, zwierzęta domowe od człowieka.
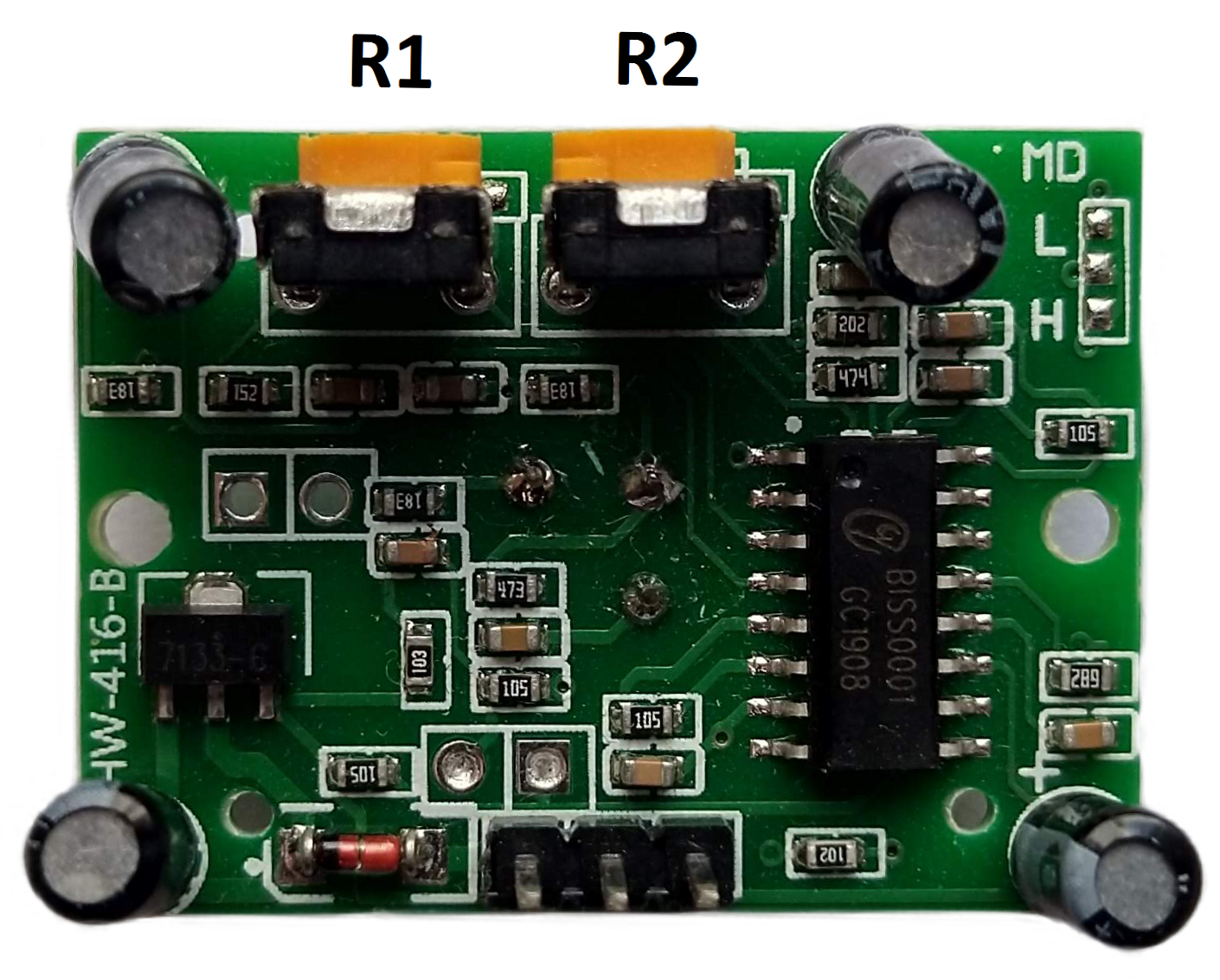
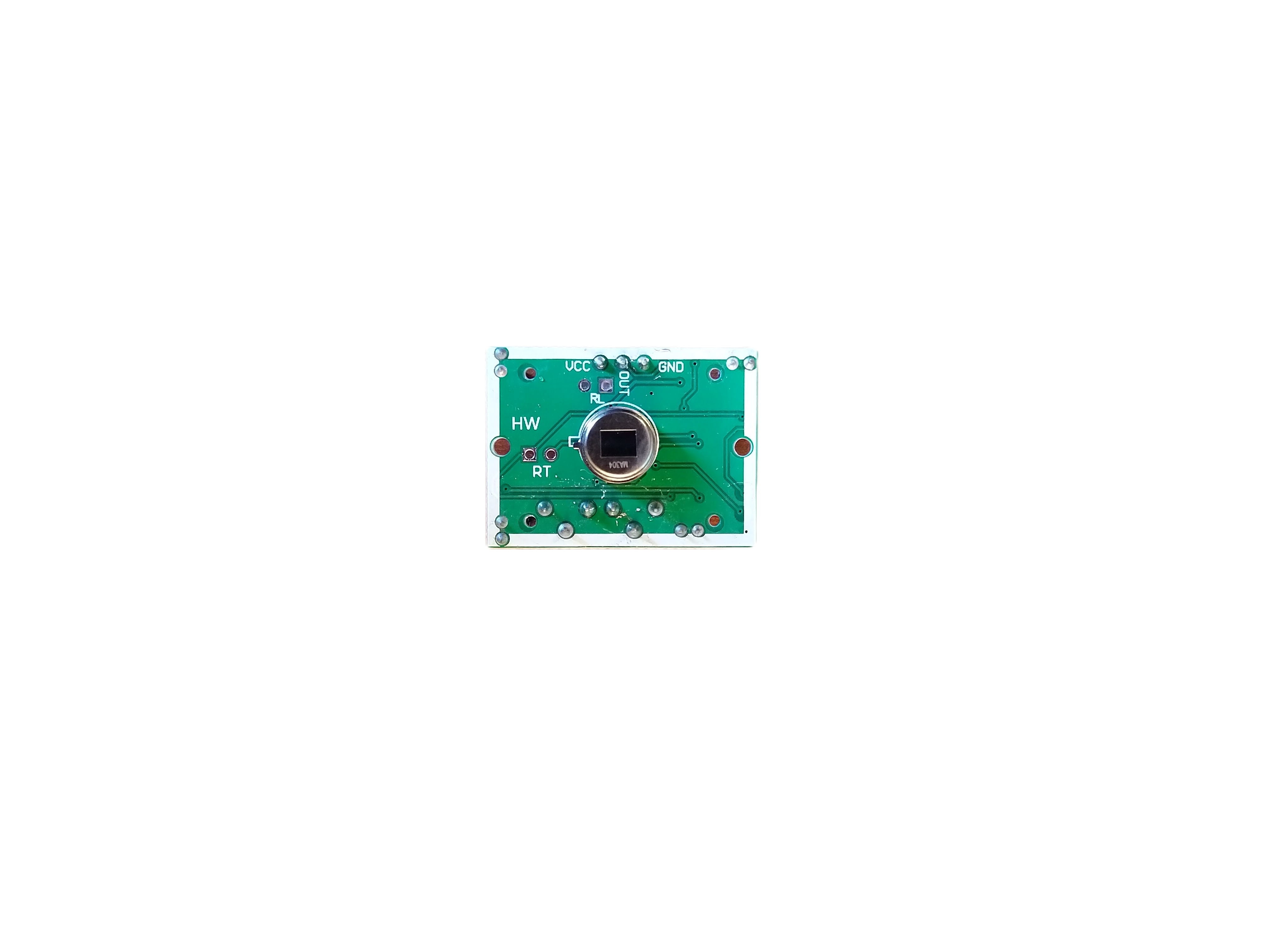
Elementem odpowiedzialnym za detekcję promieniowania podczerwonego jest sensor piroelektryczny – pyroelement. Pyroelement zbudowany jest z materiałów piroelektrycznych, które to mają zdolność do generowania napięcia na skutek ogrzewania i chłodzenia.

Jak zrobić strownik na trzy soczewki z czujnikiem pir ma to zapalać podjazd z trzech miejsc
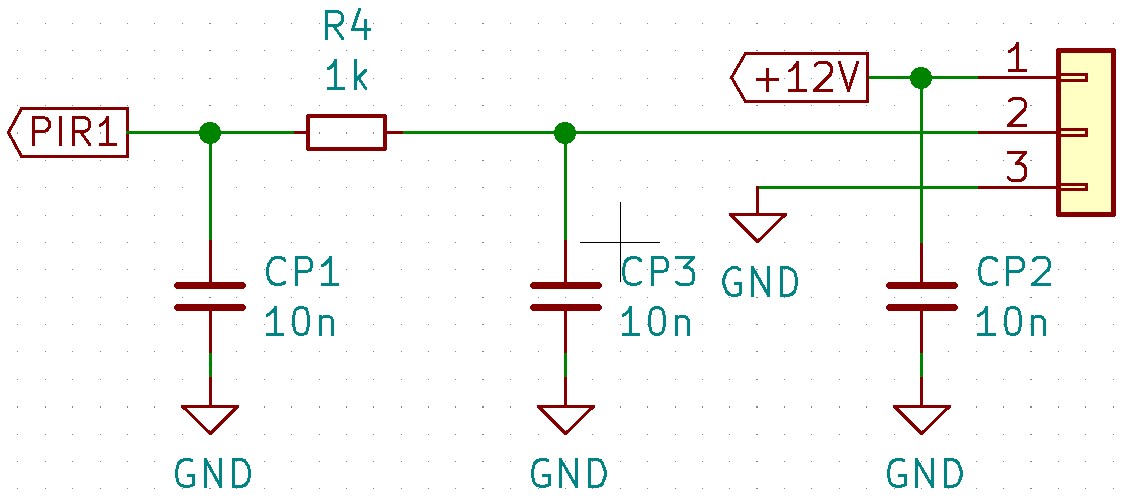
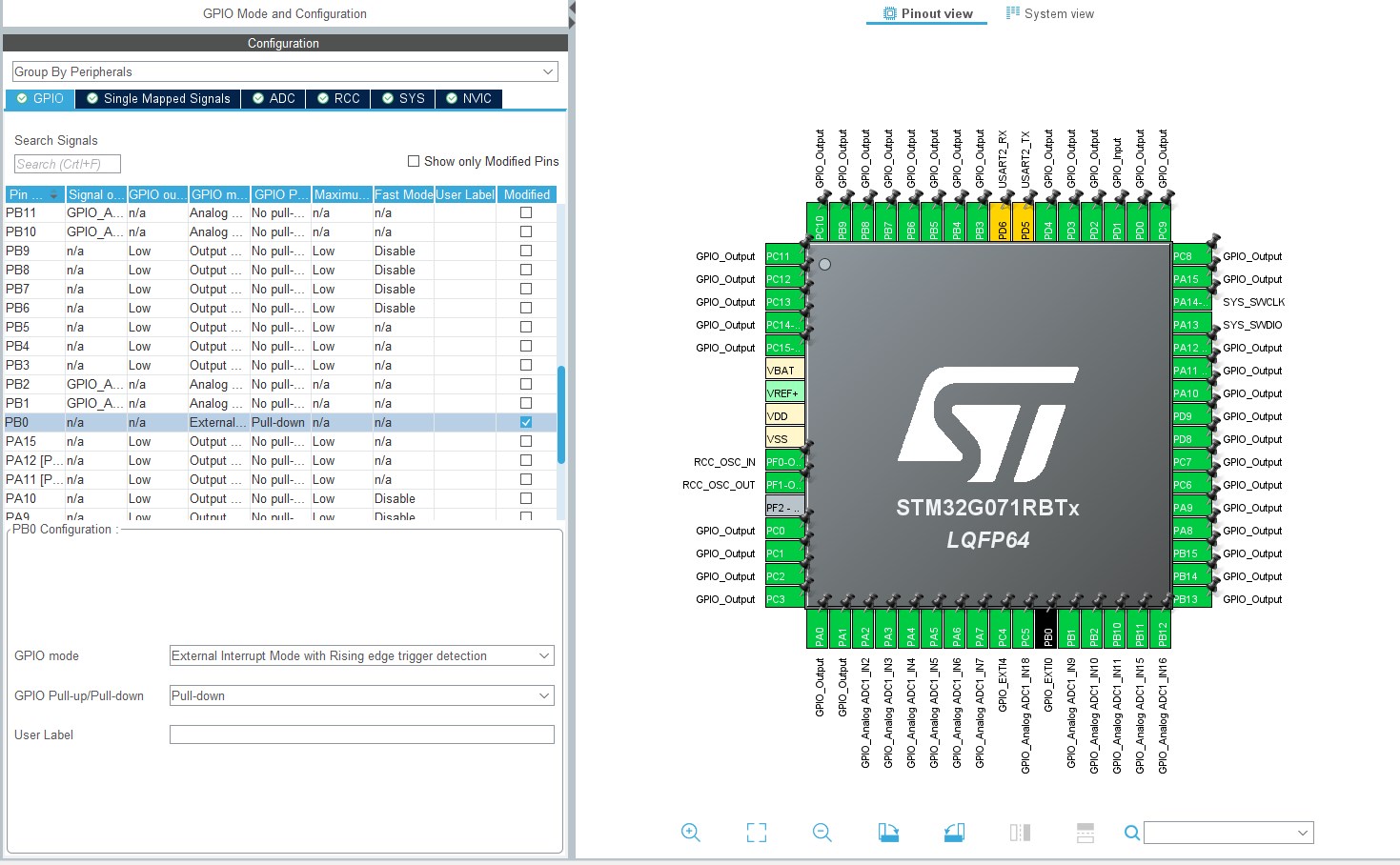
Chodzi Ci o sterownik, do którego będzie podłączone trzy czujniki PIR? W projekcie sterownika LED wykorzystuję dwa czujniki PIR, jeden umieszczony jest na górze schodów, a drugi na dole. W moim przypadku zasilam czujniki PIR z 12V, sygnał wyjściowy informujący o obiekcie jest na poziomie 3.3V, więc bezpośrednio możesz go podpiąć do procesora. Na podstawie sygnału procesor wysteruje element wykonawczy. Jeśli interesuje Cię inne rozwiązanie to napisz do mnie e-mail (mateusz.pluta@inthou.pl), chętnie podpowiem.