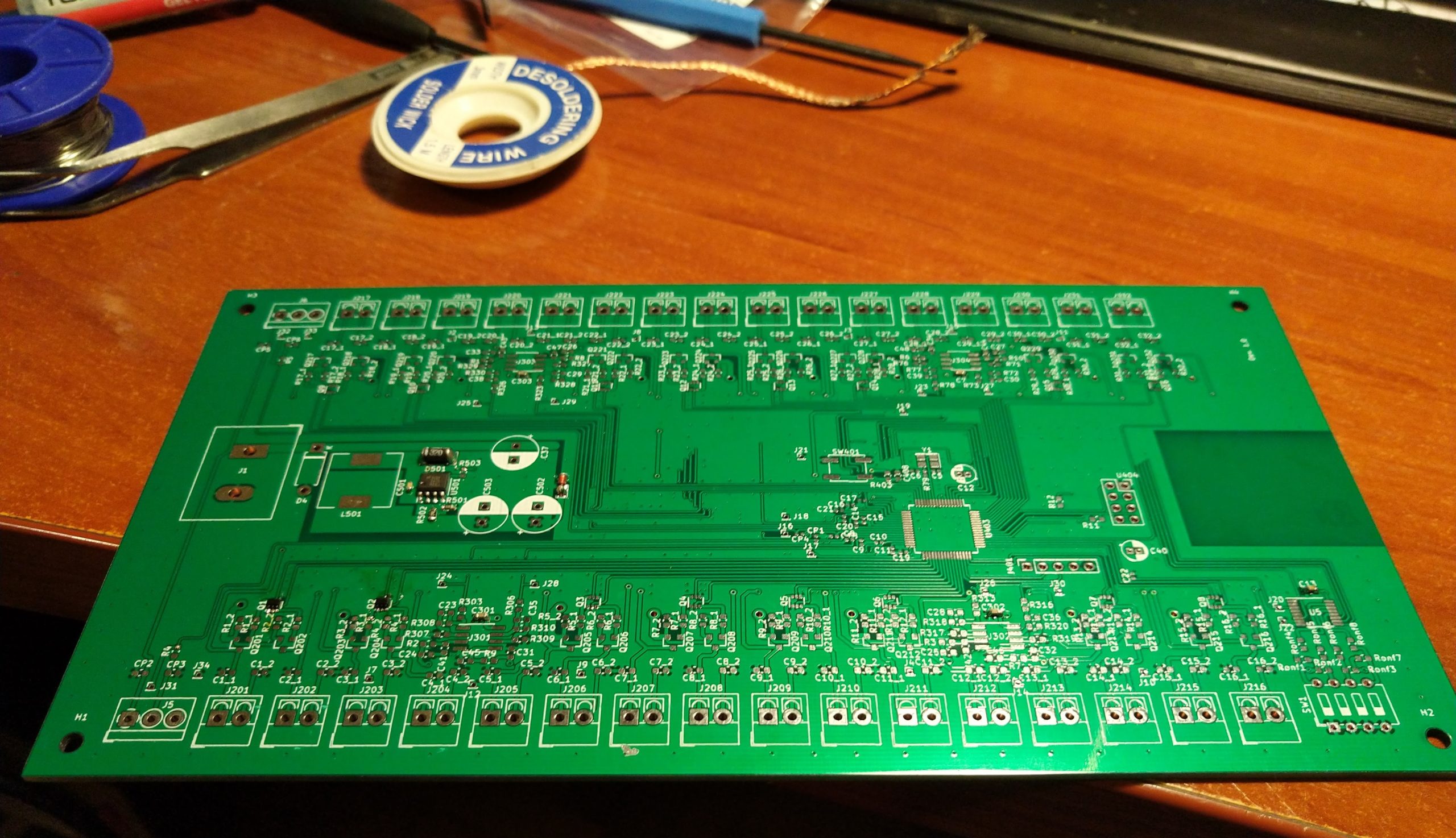
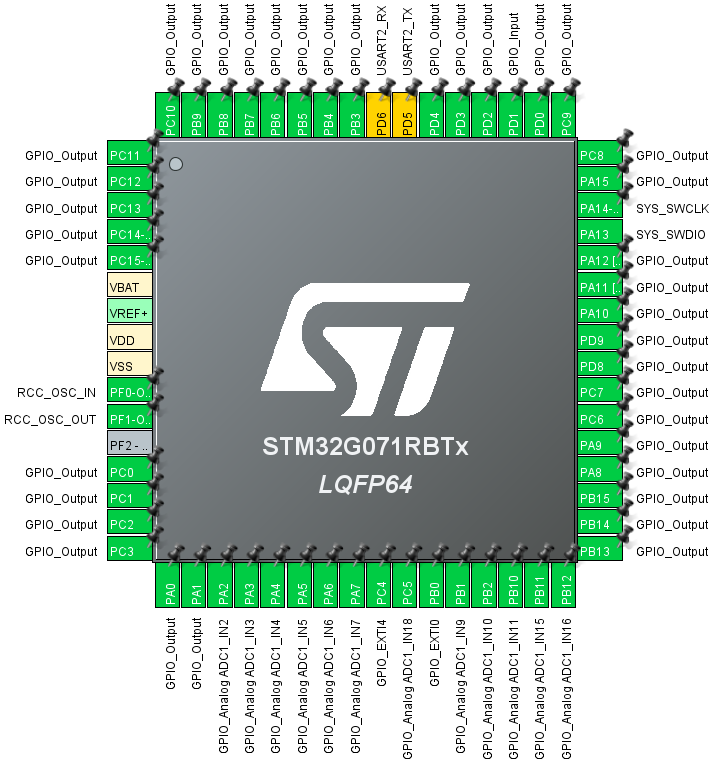
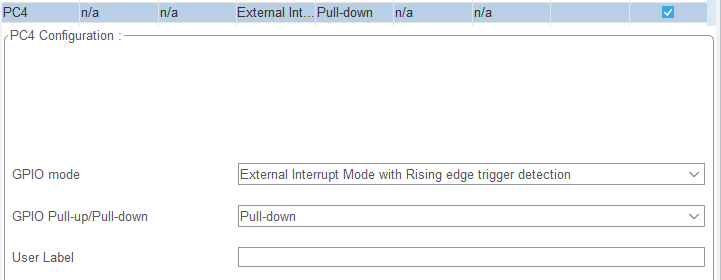
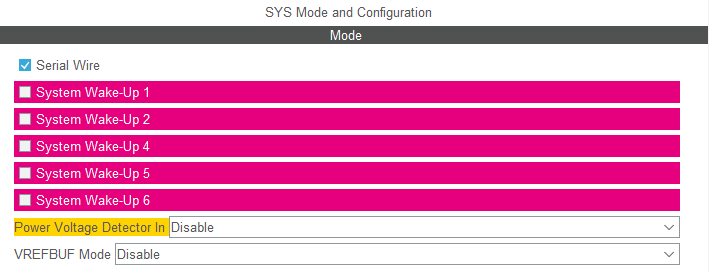
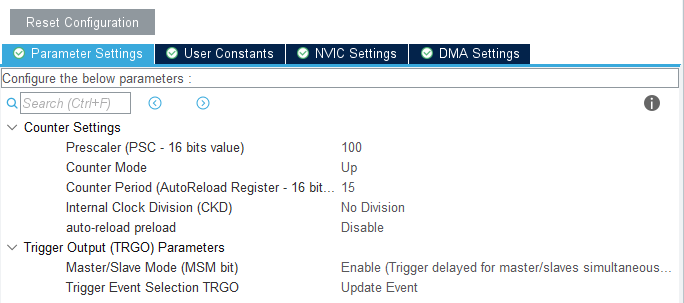
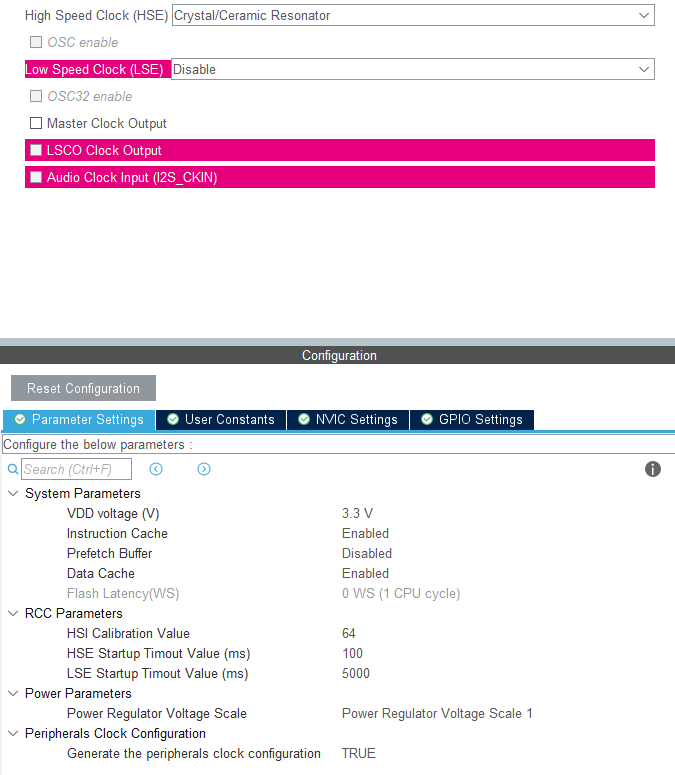
We wpisie przedstawię kolejne etapy powstawania projektu sterownika schodowego LED. Zacznę od montażu, następnie pierwsze zasilenie sterownika, dalej konfiguracja procesora STM32G0 w programie STM32CubeIDE, na końcu wspomnę o błędach, które znalazłem podczas uruchamiania. Jeśli chcesz wykonywać swoje projekty DIY i potrzebujesz asortyment, zapraszam do sklepu Mateusza Salamona (sklep.msalamon.pl).