Na rozgrzewkę:
W jednym ze swoich projektów realizowałem sterowanie silnikami prądu stalego PMDC, kontrolując prędkość i prąd. Z racji tego, że silnik był zasilany z przekształtnika umożliwiający zmianę kierunku wirowania należało użyć obwodu, który umożliwia taki pomiar prądu. Kolejnym zadaniem jakie miał spełniać układ pomiarowy było osobne zabezpieczenie sprzętowe przed nadmiernym prądem. We wpisie przedstawię Ci w jaki sposób uporałem się z tą zagwostką.
Zakres wpisu:
- Realizacja pomiaru
- Układ sumatora
- Układ zabezpieczenia prądowego
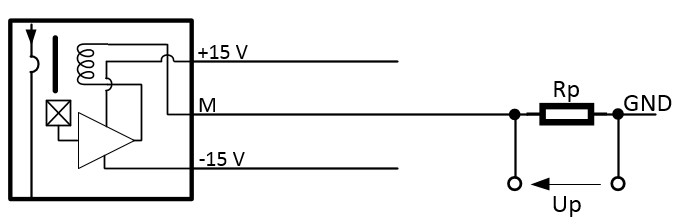
Realizacja pomiaru prądu:
Pomiar prądu realizowany był bezstykowo na przewodzie wyjściowym z przekształtnika za pomocą przetwornika, którego zasada działania opiera się na efekcie Halla. Na skutek płynącego prądu na wyjściu przetwornika generowany jest sygnał prądowy, który powoduje spadek napięcia na rezystorze pomiarowym. W zależności od kierunku wirowania spadek napięcia może być dodatni lub ujemny, dlatego niezbędne jest użycie dodatkowego układu umożliwiającego pomiar dla dwóch kierunków wirowania przez przetwornik analogowo-cyfrowy.
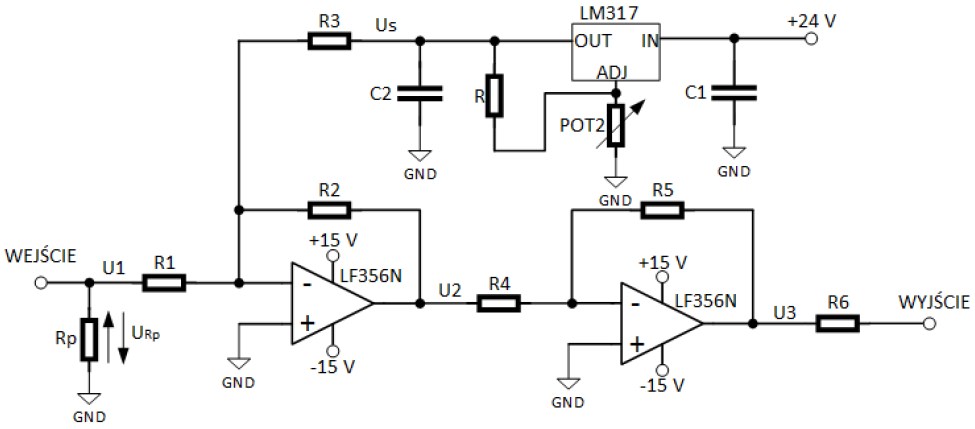
Układ sumatora
Aby zrealizować pomiar prądu dla dwóch kierunków wirowania niezbędne jest wprowadzenie stabilnej wartości offset’u, czyli przesunięcie wartości odpowiadającej 0A. Wspomniane przesunięcie ustalono w połowie zakresu pomiarowego przetwornika analogowo-cyfrowego. Do realizacji tego zadania wykorzystałem układ sumatora zbudowany z dwóch wzmacniaczy operacyjnych, stabilizatora. Pierwszy wzmacniacz pełni rolę sumatora, zaś drugi wzmacniacza odwracającego. Na WEJŚCIE doprowadzany jest sygnał z przetwornika, który powoduje spadek U1 na rezystorze Rp. Spadek napięcia sumowany jest z napięciem wyjściowym stabilizatora LM317.
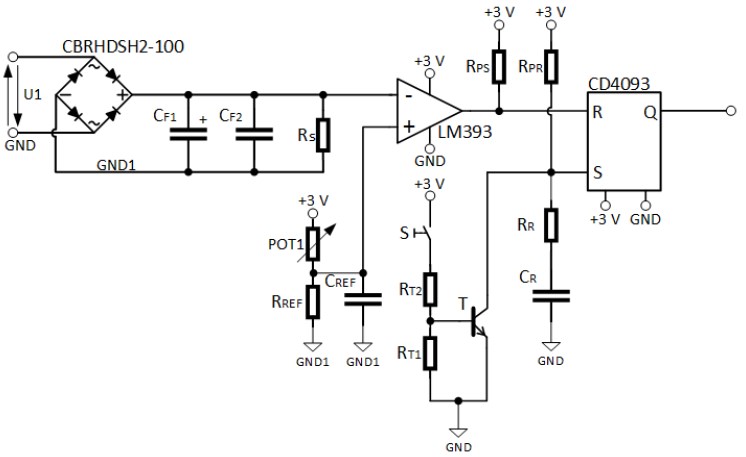
Układ zabezpieczenia prądowego
Układ sprzętowego zabezpieczenia przed zbyt dużą wartością prądu składa się z prostownika w postaci mostka Gretza, komparatora, przerzutnika RS, tranzystora, przycisku oraz elementów pasywnych. Prostownik służy do ustalenia polaryzacji napięcia wchodzącego na komparator, niezależnie od znaku spadku napięcia U1. Za prostownikiem umieszczono filtr redukujący zakłócenia CF1, CF2. Rezystor RS zabezpiecza przed stanami losowymi przy braku sygnału z układu pomiarowego poprzez połączenie wejścia odwracającego z masą. Sygnał zza filtra porównywany jest na komparatorze z wartością referencyjną regulowaną za pomocą potencjometru POT1. Kiedy wartość referencyjna jest większa od sygnału pomiarowego na wyjściu komparatora utrzymuje się sygnał wysoki. W momencie zmiany zależności między wspomnianymi sygnałami wyjście komparatora zmienia się na stan niski. Stan niski powoduje zmianę stanu przerzutnika RS na wysoki. Kiedy procesor otrzyma logiczną jedynkę z przerzutnika RS sygnały PWM są zerowane. Po zmniejszeniu prądu przerzutnik utrzymuje stan poprzedni czyli logiczną jedynkę, aby uruchomić ponownie przekształtnik należy zmienić stan wyjściowy z przerzutnika. Zmiana stanu przerzutnika realizowana jest poprzez tranzystor T pobudzany przyciskiem S. Rezystory RPS oraz RPR łączą wejścia SET i RESET ze źródłem napięcia, aby w stanie normalnej pracy przerzutnik utrzymywał na swoim wyjściu stan poprzedni.